(初心ドライバー向け)
カーブナビゲータ
機械工学科 03-180170 伊藤健太
この作品を作成しようと思った動機
自動車免許とりたての頃に、ブラインドカーブのきつさがわからず減速不十分で突っ込みかけてしまった経験があったので、カーブに入る前にカーブのきつさ(曲率)を示してくれるデバイスがあったら役に立つのではないかと考え作成するに至った。
仕組み(フローチャート)
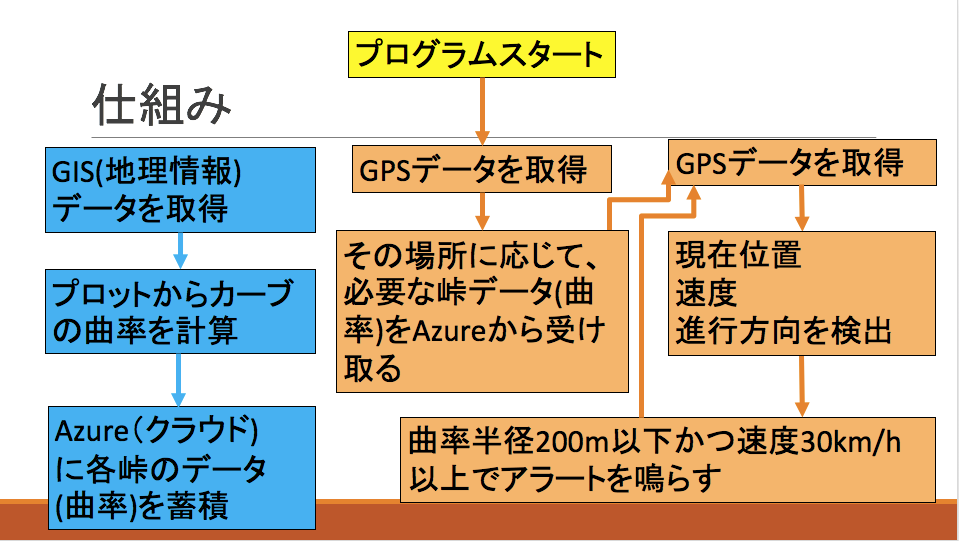
あらかじめPC, Azure(クラウド)上でやっておくことが青のフローチャート、raspberry pi上でその場で処理することはオレンジのフローチャートとなる。
あらかじめ各峠の地理情報データを取得し、GPSポインタと曲率データを紐付けしてAzure上に蓄積しておく。峠の中でGPSデータを取得し始めると、その場所に応じて峠データをAzureから受け取り、速度と進行方向に照らし合わせてアラートを鳴らす。
難しかったのはQGISという地理情報アプリを使って地理情報データを取得し、プロットからカーブの曲率を計算するところ(地理情報データを取得してからデータセットを整形するところ)と、GPSデータをセンサから取得するところ(マイコンとセンサの仕様を理解して適切に配線をするところや、raspberry pi上での環境構築。天球が見えるところでないとGPSが動かないといった事象をクリアする工夫が必要だった)。さらに速度計を作るところ、当初は加速度センサの値を単純に積分して作るつもりであったが、ノイズの影響が重大であった(積分されることで増幅される)ので、ハイパスフィルタを作る必要が生じた。いろいろ調べて検討したものの、最後までうまくいかなかったので、諦めて[速度=GPSセンサの位置差分/GPS1ステップの時間]の単純計算で求めた。
製作過程では、全てが初めての実装になるので、Googleで検索し、先生に相談し、優秀な同輩の皆さんに教えを請い、公式のドキュメントを読み漁り… 一つ一つの進捗が一筋縄では生まれず、とても時間のかかる作業となった。特に各種センサを使い始めるといったような環境構築が難しかった。
反対に、楽しかったことや嬉しかったことは、各進捗が産めた時や最終的に作ったものが実際動いた時で、作っている間はこれが本当に峠で使えるのかずっと不安だったものが解消された瞬間の気持ちはやはり忘れられない。
発表では、ダイレクターの西先生や中尾先生に、「発表では技術的な側面よりもこの製品があるとどういう人が嬉しいのか、どう嬉しいのかをもっと前面に押し出すべきで、1分程度のPVとか作るといいのではないか」というアドバイスをいただいた。
この演習全体を通して学んだのは
- 0から製品を作るには、コードを一から書いたり、CADを白紙から設計したりするのではなくて、Googleを想像以上に駆使してサンプルコードを探し、そこから改変する作業が大半を占める。そしてその作業はやったことない人が想像する以上に時間がかかるし苦労するものである。
- なにか製品を作ろうと考えるときには、技術的側面ばかり考えるのではなくて、その製品がどういう人にとってどのように役に立つのか、「使用者がほしいもの・機能はなんなのか?」ということを強く考え、工学部生ゆえに技術的部分にばかり注目してしまうことのないようにせねばならないということ。そのためには、技術者こそ社会に眼を向けるべきであるということ。
以上二点である。大学という場で、インプットばかりでなく、0からアウトプットを学べるこうした機会は大変貴重でありがたいものだったと思う。この演習に協力してくださった西先生、中尾先生、石山さん、萩尾さん、山岡さんをはじめとして、全ての皆さんにこの場をお借りしてお礼申し上げます。ありがとうございました。
伊藤健太