PBL報告書
工学系研究科機械工学専攻 37-196222 友竹将太郎
「水中探索ドローン」
背景
釣りにおいて,もちろん竿の動かし方や魚との駆け引きなどの技術は重要であるが,様々な情報を熟知することが釣果を上げるためには不可欠である.気候や時間,水温,水深,潮目など多くのことが魚の居場所や反応する餌に影響する.海中は見えないため,現状ではこれらの情報から魚の居場所を推測する他ない.それは,素人にとって非常に難しい点であるが,一方で玄人にとっては釣りの醍醐味なのだ.
そこで,釣りにIoT技術を取り入れることはできないか考えた.なかなか釣れない素人の退屈を凌ぎ,よく釣れる玄人の新たな楽しさを見出すような,互いのニーズに合った製品である.そこから,“水中探索ドローン”を考えた.PCやスマートフォンなどの個人のデバイスから遠隔操作し,水中の様子を撮影する.その映像をモニタリングしながら釣りを楽しむことができる.魚の居場所を確認したり,釣る瞬間の迫力ある映像を楽しんだり,動画配信に利用するなど,用途は様々あり,釣りをより面白いものにすることができる.
水中探索ドローンの概要
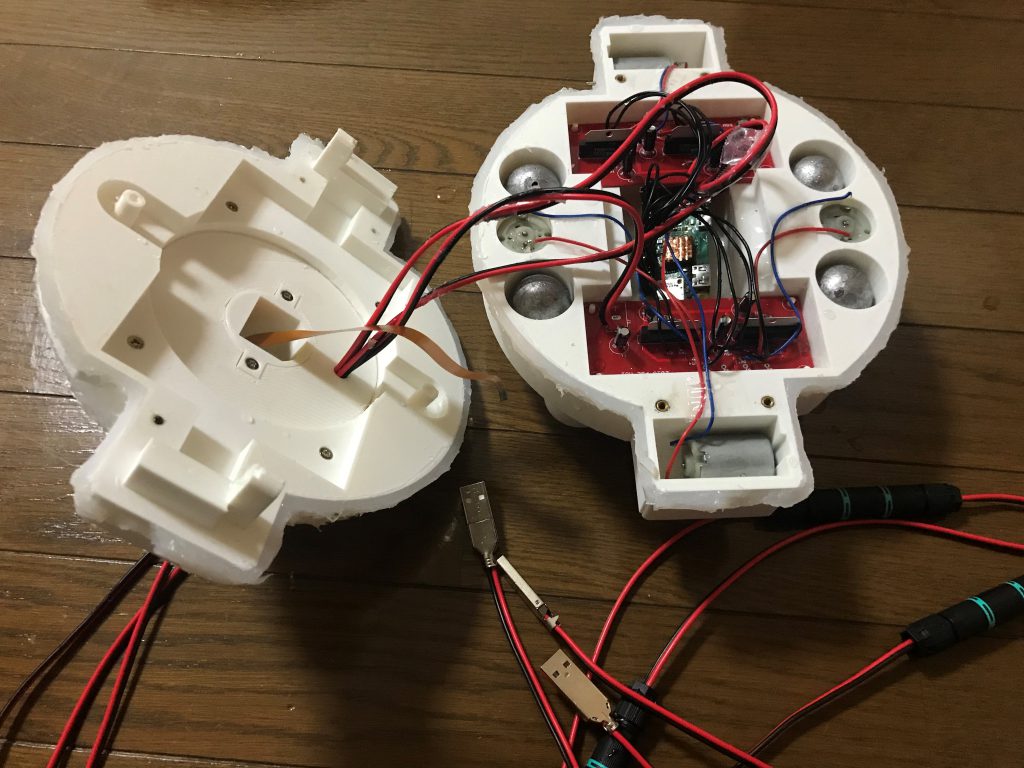
水中探索ドローンの外観と内部構造を図1,2に示す.水の抵抗を受けにくいように円盤構造に基づいている.その内部には, Raspberry-Pi 0w→基板→DCモータがそれぞれ0.5 sqの並行ケーブルで順に接続されている.4つのDCモータから,上下,前後,回転移動を可能としている.ここで,モバイルバッテリーはドローンの外部にあり,そこからモータとRaspberry-Pi 0wの動力を供給する.撮影にはRaspberry-Piカメラを使用し,ドローンの上部に設置している.また,ドローンに対して浮力が非常に大きく作用することから,釣り用の鉛玉を用いて調整している.
図3のように,PCとドローンの通信を行う.ドローン内のRaspberry-Piでサーバを立ち上げ,カメラで撮影された動画をストリーミング配信する.PCからWEBブラウザを通して,Raspberry-PiのIPアドレスを指定することで,ストリーミング動画をみることができる.また,ドローンのモータを制御するコントローラもブラウザから操作できるように設定している.

今後の展望
今回,釣りをする際に利用できる水中探索ドローンの開発を試みたが,ドローンのサイズや操作性の面で,まだまだ課題がある.持ち運びなどを考えると,今後はより小型化や軽量化を行う必要がある.また,操作性に関して,コントローラのシンプルさはあるが,釣りをしながらドローンを操作するに4は少し難しい.そこで,動体を検知して追従する自動操縦機能を付けることを考えた.今回はプログラムまで作成したが,実装には至らなかった.今後の実用化を考えると,その機能の実装は必須である.
謝辞
IoTメディアラボラトリーのスタッフの方々には,アイデア出しから製作まで非常に手厚くご指導いただきました.ものを作る楽しさや難しさを体感するとともに,IoTに関する知見も広げることができました.私にとって非常に有意義な時間を提供して頂き,本当にありがとうございました.