IOT PBL報告書
37-196212 機械工学専攻 鈴木森本研究室修士課程1年 坂本慧
1.背景
2019年現在、東京では来年に控えた東京オリンピックに向けて主要駅の修繕が進んでおり駅内は非常に使いにくくなっている。そのため現在訪日する外国人観光客などの日常的に駅を活用していない方が快適に移動できているとは言い難い。
私はこういったニーズを解決するために小型マッピングカーを制作した。これを用いて構内のマップを簡単に作ることができると考えた。
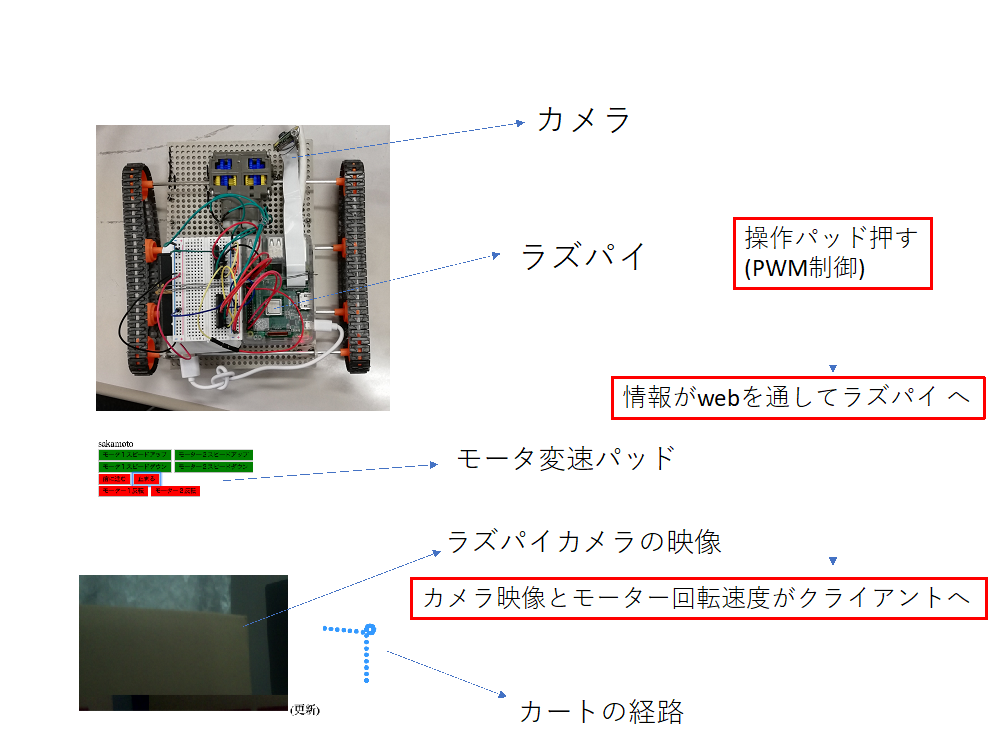
2.完成品概要
完成品は上の図のようになっておりwebからカートの位置情報、カメラ映像、モーターの変速が行えるようになっている。
詳しくはRasberryPiでNode.JSサーバーを立ち上げSocket.ioを用いて通信を行なった。
Socket.ioを用いるとサーバーPCとwebクライアント側で相互通信が可能になる。
各種処理についてもNode上で動作するライブラリを用いた。
具体的には
DCモーターの制御 :PIGPIO
カメラ映像のタイムラプス撮影 :raspberry-pi-camera-native https://github.com/sandeepmistry/node-raspberry-pi-camera-native
で行なった。
最終成果物評価
最終成果物として納得のいくものを作成することができなかった。理由はマップの保存や写真を任意地点で撮影するなどのマッピングカートとして最低限の機能を作れなかったことが挙げられる。
また機能的な部分以外にも設計生産フィールドワークとして求められている部分が今回の制作物には大きく欠けていたと考えられる。つまり本授業では社会の潜在的ニーズに応えるものを作成し、第三者からアウトプットに対して評価をもらう必要があった。