Auto Feeding System
機械工学科3年 服部智也
やろうとしたこと
私が本演習で作ろうとしたのはペットに外出先から餌をやることのできる機械です。結論から言うと最後まで完成しなかったので途中時点での写真です。

これだけではオリジナリティおよびIoT要素がないのでいくつか機能を足そうと試みました。しかし、時間の関係もあって結局付け足した機能は以下の1つに絞りました。
・餌が少なくなったら飼い主に通知を送るシステム
なぜ今回これを作ろうとしたのかというと、建前としては共働き世帯が増えている中でペットを飼いやすいシステムを作れればと思ったからです。まあ、本音としては単純に自分の生活の身近なところが便利になればいいなと思ったからです。
演習内でできたこと
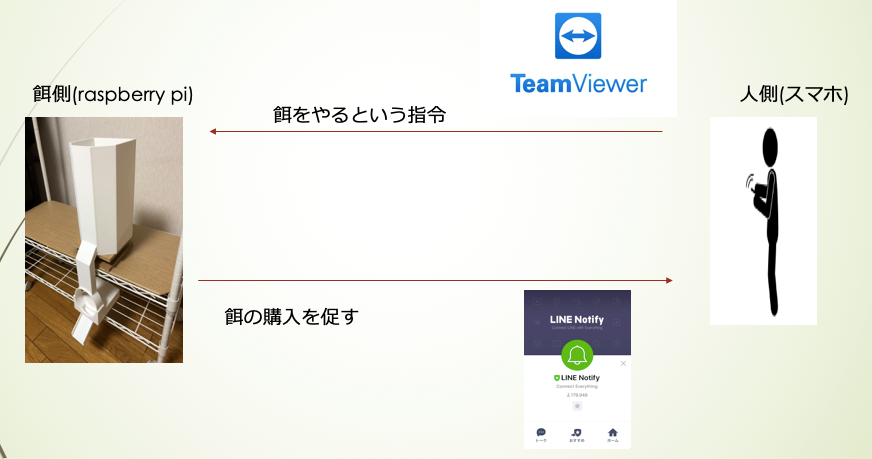
まず、外出先から餌をやる機能については自作のWebアプリからラズパイに指令を送りモータを動かすことを当初は予定していました。しかし、給餌機械のハードの作成に手間取っていたのもあってWebアプリ作成は断念し、TeamViewrを用いてスマホからラズパイに指令を送れるようにすることで外出先からラズパイに指令を送る体裁をなんとか整えました。給餌機械の回転部分を回すことで一定量の餌を取り出すことをイメージしました。
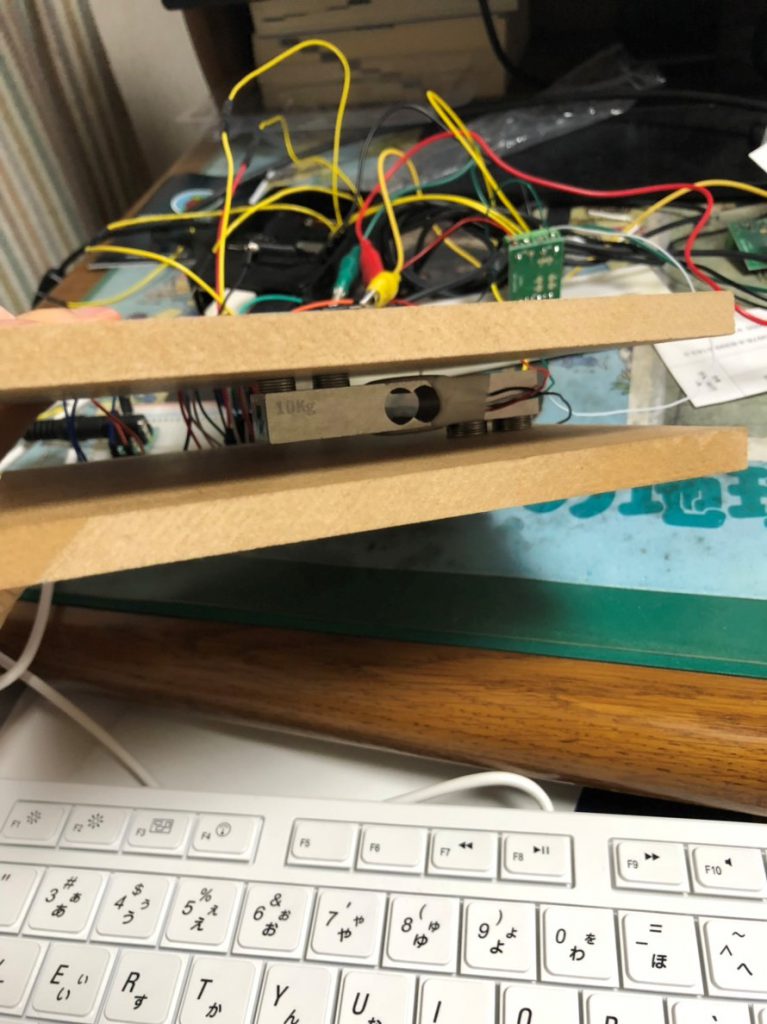
餌が不足したことを通知する機能はロードセルで自作した体重計を用いてラズパイからLine notifyを通してLineで通知できるようにしました。
ロードセルで自作した体重計は以下のように木の板でロードセルを挟む形で作りました。
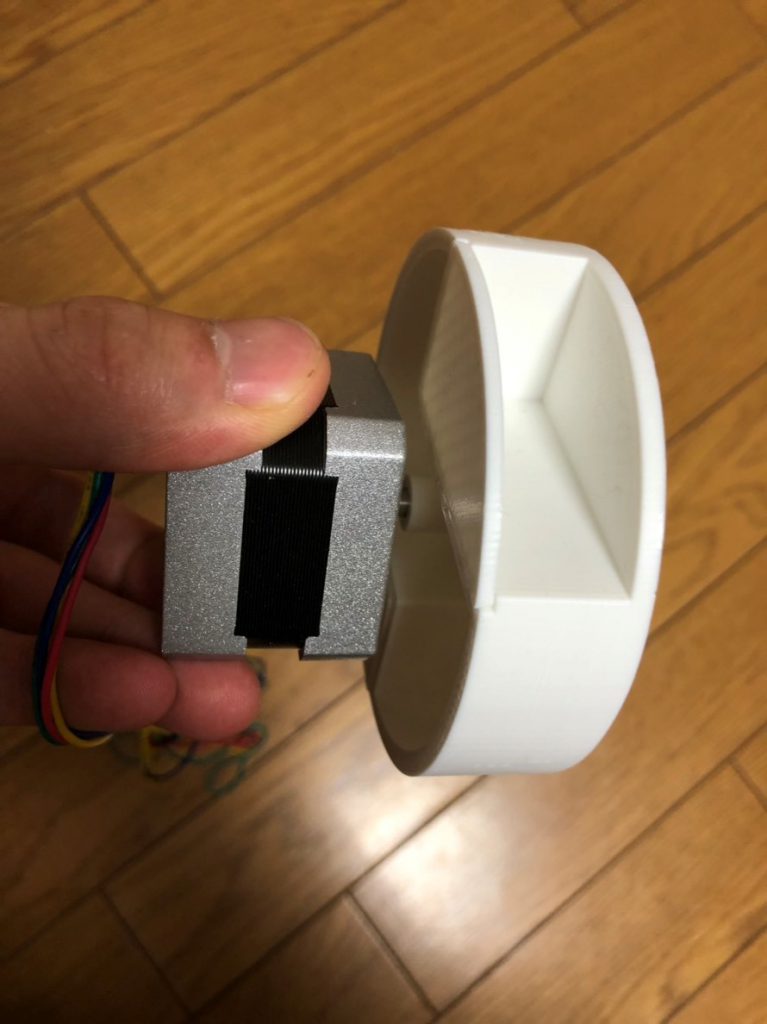
給餌機械のハードに部分は自分で一から設計を考えてその設計を元に3Dプリンタで刷ってもらいました。
全体のシステムのイメージは以下の図を見ていただけたらわかりやすいと思います。
展望としましては、製品化を考えるともっとコンパクトな形状にする必要があったと思います。
演習の感想
演習を通してまず「IoT」とはなんなのかということを何度も考えさせられました。演習を終えた後になって考えてみると、自分がやろうとしていたことはIoTの趣旨とは若干ずれていたのではないかということを考えるようになりました。(遅い)
これからIoT演習に取り組む方は、まずIoTの本質についてよく考えたうえで何を作るか考えることをお勧めします。
また、他の方も多分同じことを言っていると思いますが、スケジューリングの大切さが身にしみました。自分はハードの作成に気をとられてソフトの開発がおろそかになってしまった部分があります。与えられた時間を有効に使うためにもまず、どういった時間配分で完成させるのか考えることが大切だと思いました。
演習を通して、うまくいったこともあればうまくいかなくて壁にぶつかることもありました。今回の演習で得たこれらの経験は自分にとってかけがえのないものになると思います。
最後になりますが、演習をサポートしていただいた方々にお礼を申し上げたいと思います。ありがとうございました。